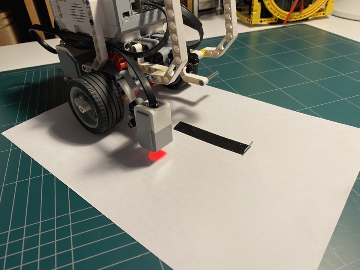
요즘 51515 조립하는 재미에 빠졌다^^. 사진은 51515 미니 로봇중 찰리다! 큰거 들고 올려다가 지방에 수업이 있어서 머리도 식히고 집중할 겸 51515 로봇 세트를 가져왔다.
위 사진은 부품들인데, 박스에 넣고 조립을 할려니 찾기 힘들어서 책상위에 펼쳐두고 조립했다. 그냥 찾기도 힘든데 작은 박스에 겹쳐 있으니 더 찾기 힘들다.
역시 귀엽다! 주말에 집에 가서 큰놈이랑 미니 같이 사진으로 남겨야 겠다^^

#51515 #40413 #찰리 #마인드스톰 #인벤터
반응형
'레고' 카테고리의 다른 글
| [레고]Balance Clock With Remontoire[NICO71] (0) | 2022.01.01 |
|---|---|
| 일공펀치(6mm) for 레고 (0) | 2021.09.01 |
| 레고에서 온 우편물~ (0) | 2021.09.01 |
| 레고 미니피규어 시즌 20 - 광교 갤러리아에서 (0) | 2020.06.16 |

두리뭉실2:해피파인더그룹
레고가 좋고~ PBL 매력에 빠졌으며~ 취미로 개발하는 두리둥실