가속도 센서를 감지하면 실행 블록 사용하여 간단하게 구현을 할 수 있다는 장점은 있다. 대신 빠르게 동작(제스처)을 하다 보면 조종기와 R/C CAR가 다를게 동작한다. 예를 들자면 조정기는 왼쪽 기울기 동작을 하고 있는데 R/C CAR는 오른쪽을 동작을 한다. 이유는 이벤트 감지 시 딱 한번 이벤트를 실행하기 때문이다. 또한 한 동작 구현이 5가지로 제한되어있다.
업그레이드된 R/C CAR 구현하기
기존 5가지의 동작에서 대각선 방향이 추가된 9가지 동작을 구현했다. 한번 더 업그레이드 한다면 방향의 크기를 구현할 생각이다. 여기까지 하면 해야 할 것들이 많아져서 자유 미션은 9가지 동작으로 할 것이다.
코드 비교
동작(제스처) 감지하면 실행 블록 이용 - 5가지 동작가속도센서 X. Y출을 이용하여 9가지 동작(제스처) 구현 블록 코드
FC(앞으로) , FL(왼쪽 앞으로), FR(오른쪽 앞으로), CL(외쪽), BL(왼쪽 뒤로), BC(뒤로), BR(오른쪽 뒤로), CR(오른쪽), CC(정지) 9가지 동작(제스처)에 맞게 R/C CAR에서 구현해 주면 된다. 특이한건 boundray 변수를 이용하여 가속도센서가 반응하는 크기를 조절한다. 보통 boundary과 -boundary을 코드로 표현할 때는 그대로 사용하면 되는데, 블록은 [0 빼기(-) boundary] 로 해야 한다.
|| 필수 미션 : 마퀸 플러스가 정지선 앞에 정지하여 정해진 TAG가 인식되면, 경적을 울리고 전진하기
틈틈히 마퀸플러스 & 허스키렌즈 튜토리얼 문서를 보고 연습한 끝에 필수 미션을 할 수 있게 되었다. 영어로된 문서이지만, 그림들만 봐도 의미는 대충 알 수가 있다. 최근에 아이씨뱅큐에서 '마이크로비트 마퀸으로 배우는 AI세상' 책을 출판했다. 한글로 된 책이 필요하다면 '마이크로비트 마퀸으로 배우는 AI세상'이 제격인거 같다.
마이크로비트로 배우는 AI세상
처음에는 복잡해 보였지만 필요한 기능을 정리해 보니 몇 개의 블록으로 간단하게 필수 미션을 완료하게 되었다. 필수 미션 시작하자!
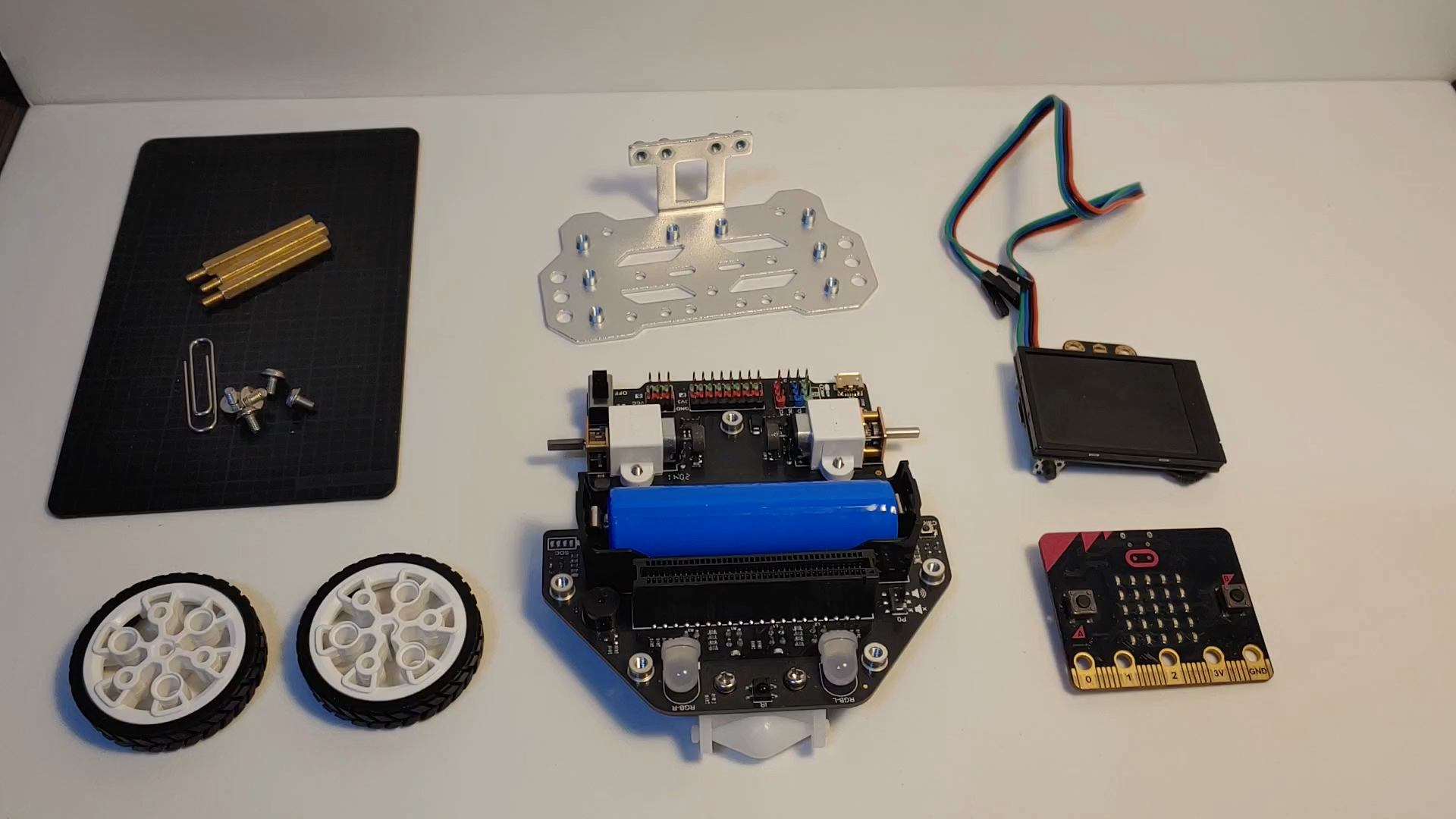
|| 준비물
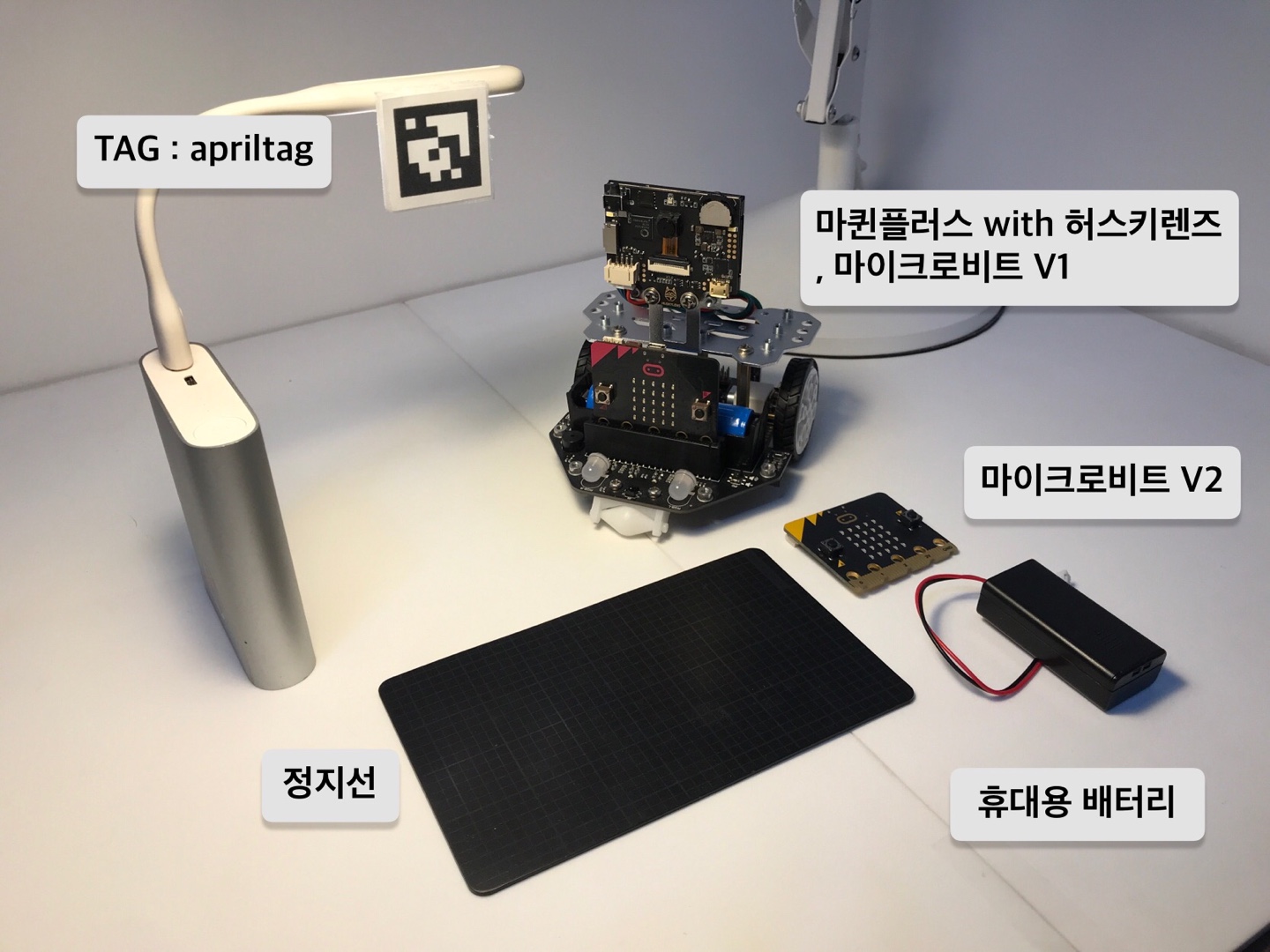
필수 미션을 위한 준비물
TAG : apriltag
허스키렌즈에서 인식 할 수 있는 TAG는 apriltag중 tag36h11이다. 어느 정도의 흰색 바탕이 필요하다. 프린터로 출력하여 여백을 충분히 주고 자른다. 사진에서는 TAG를 고정하기 위해 샤오미 배터리와 USB LED램프롤 사용 했다. TAG를 고정할 수 있는 것이면 어떤것이든 좋다.
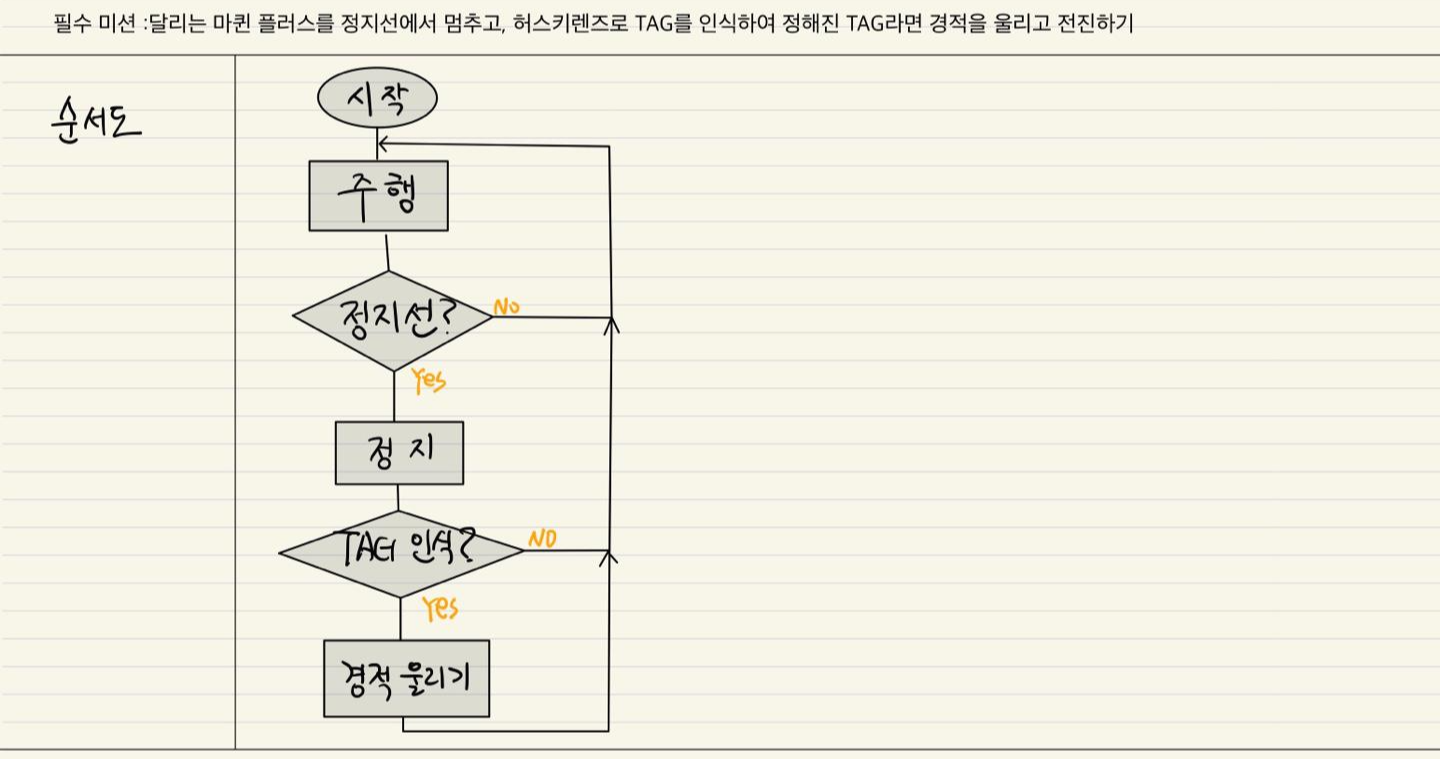
반응 프로그램(이벤트)을 순서도로 표현하기에는 조금 부족한다. 프로그램을 순서도로 그리는게 함정이지만(힘들지만)^^ 순서도 대로 프로그램을 작성하니 헤매지 않고 좋다.
전체적인 프로그램 순서도
| 주행
2개의 마이크로비트를 가지고 라디오 기능을 이용하여 R/C CAR 프로그램을 작성한다. 가속도 센서의 'XXX 감지하면 실행' 블록을 사용하여 '앞으로', '뒤로', '왼쪽으로', '오른쪽으로', '정지' 기능을 리모트 컨트롤에 구현하고 '라디오 수신하면 실행' 블록을 이용하여 마퀸플러스에 구현한다.
| 정지선인식
마플 플러스에 있는 적외선 센서(2개 이상)를 이용하여 정지선(검은색 패드)을 인식한다.
read line-tracking sensor XX block
| 정지
| TAG 인식
아래의 블록을 이용하여 TAG가 인식되었는지 알 수 있다.
HuskyLens check if ID X frame is on screen from the result block
| 경적 울리기
도솔도레미레도솔 라파라도파미레도 시솔시레솔파미레 미솔레솔도~ 이걸로 정했다. 서울메트로 승강장 내 열차 진입음이다.
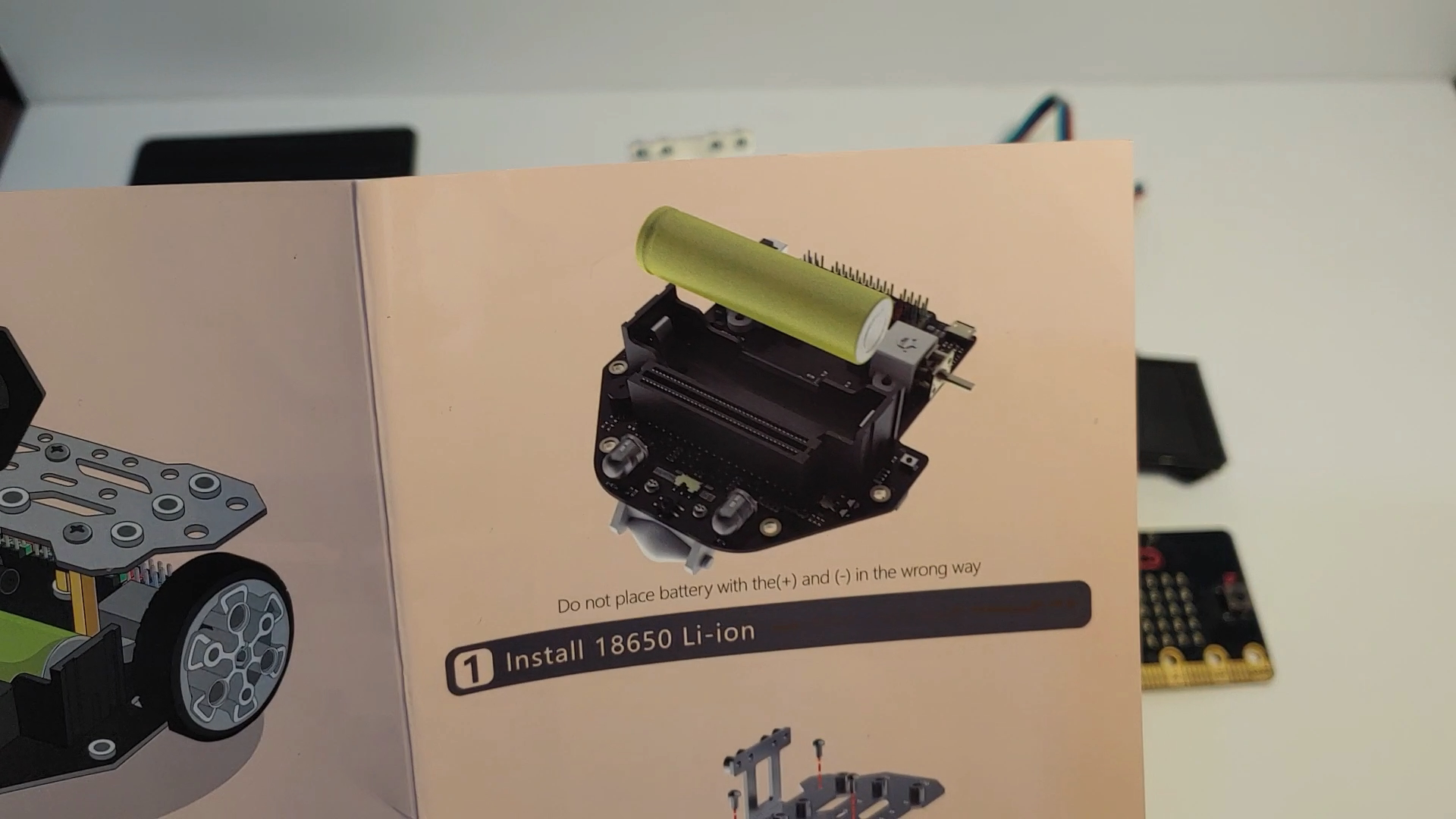
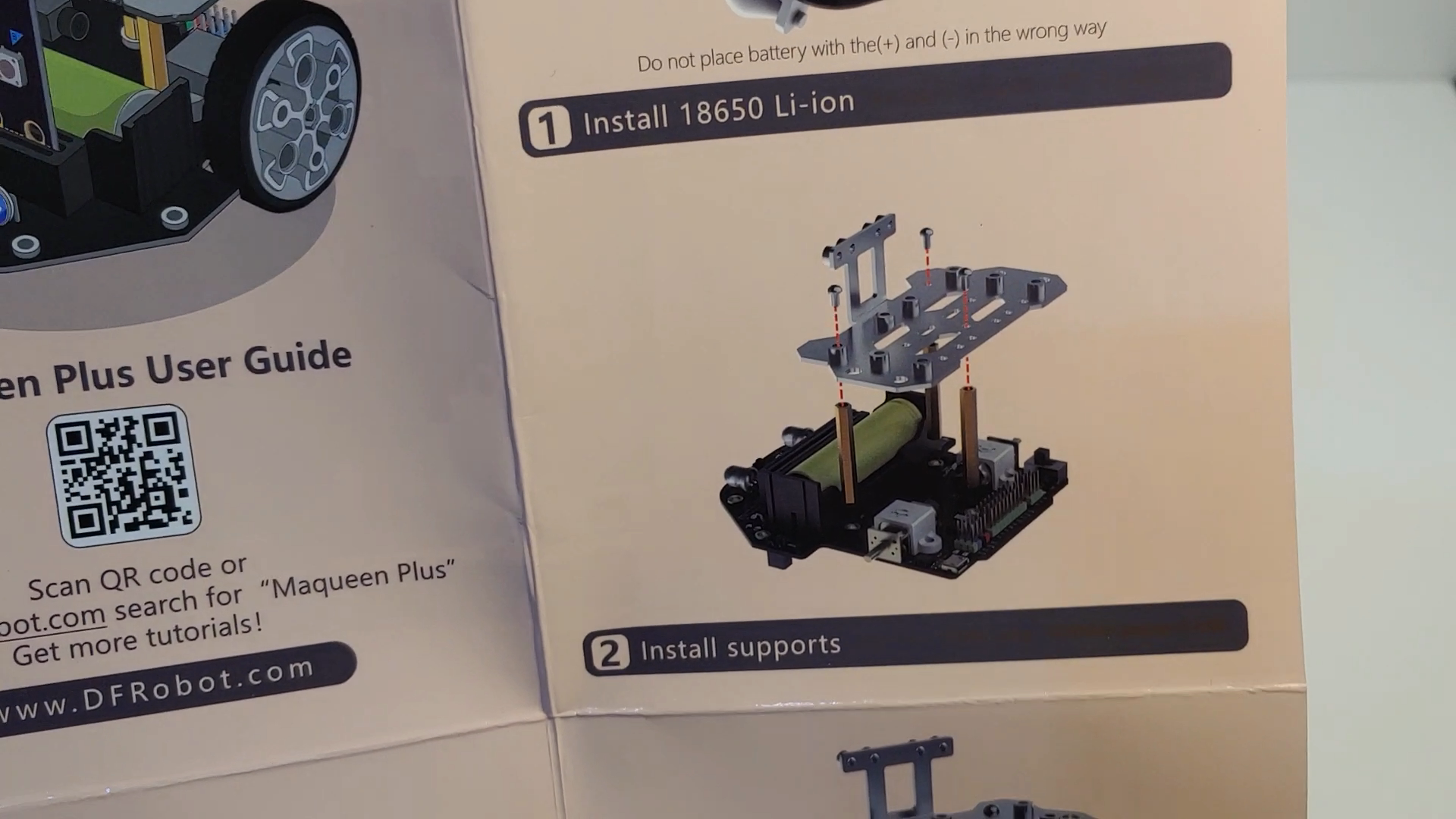
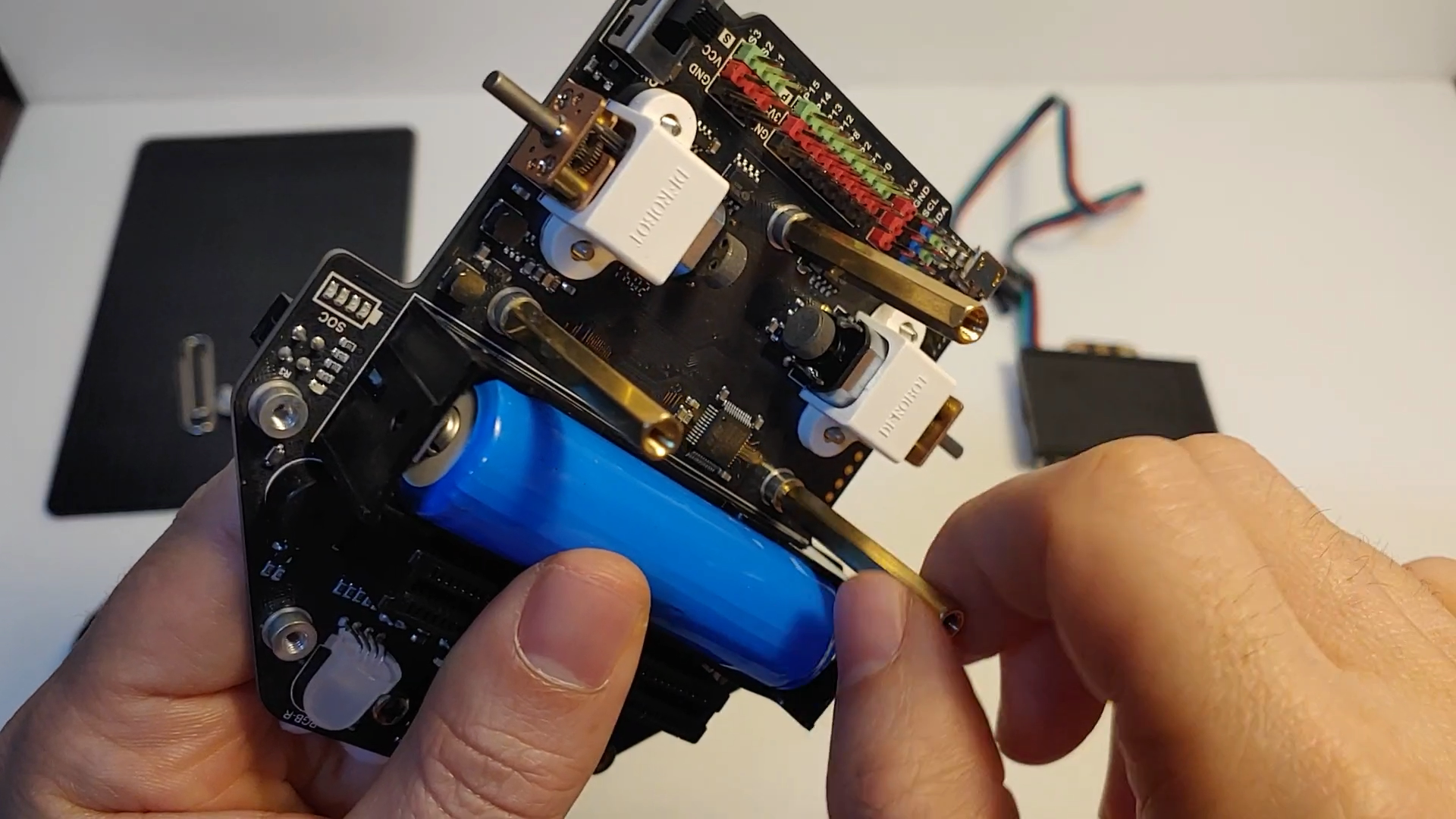
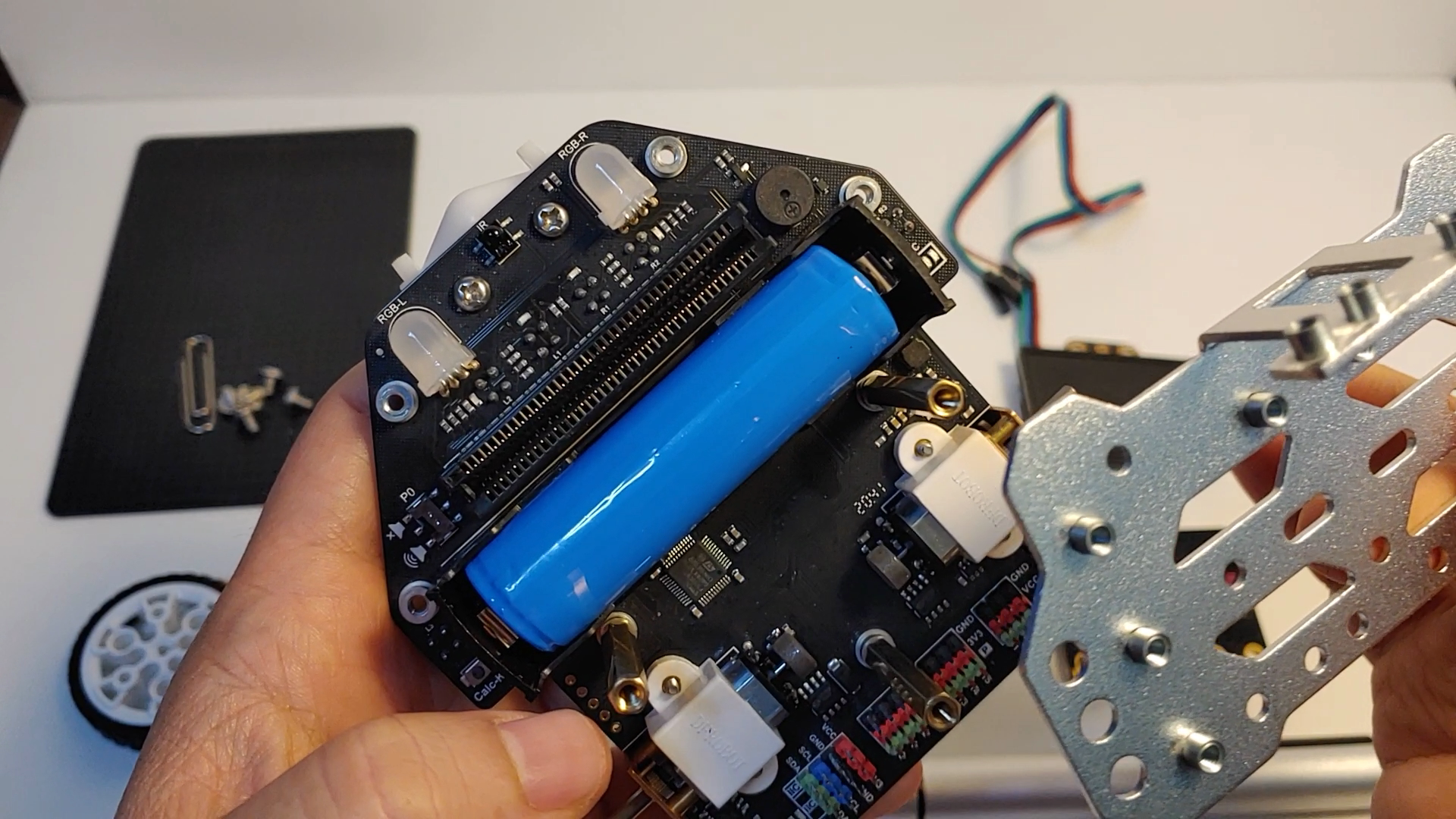
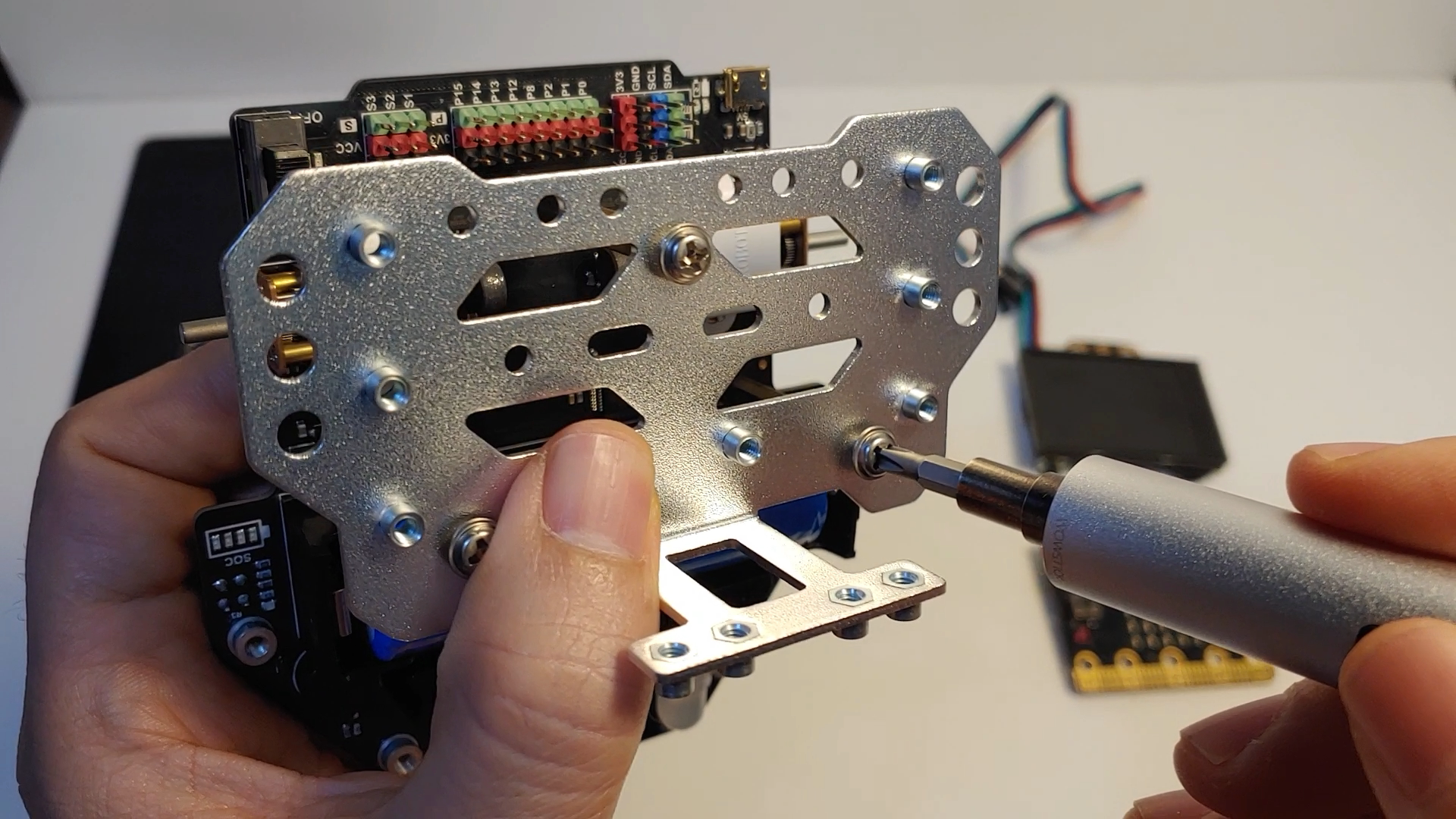
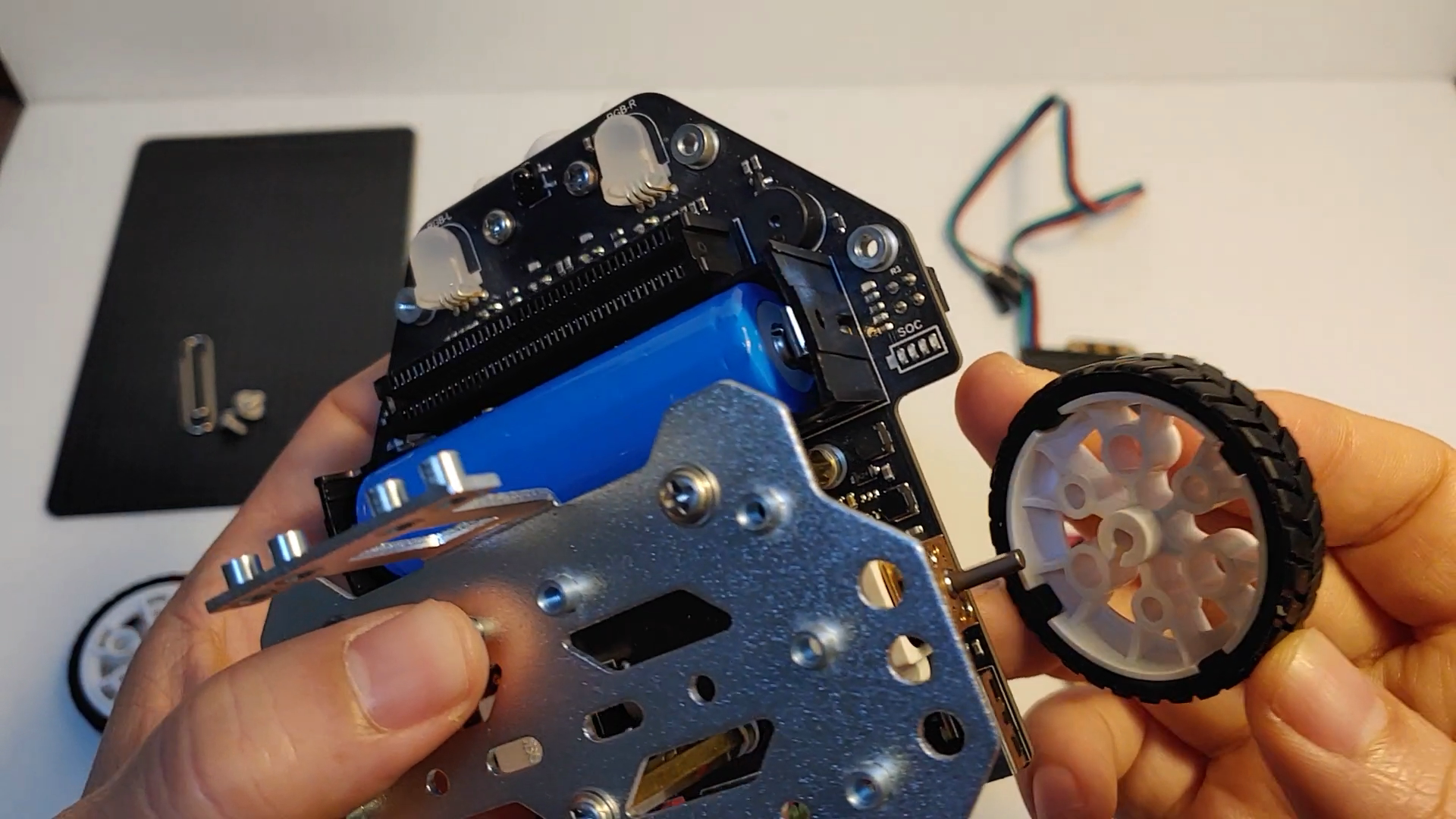
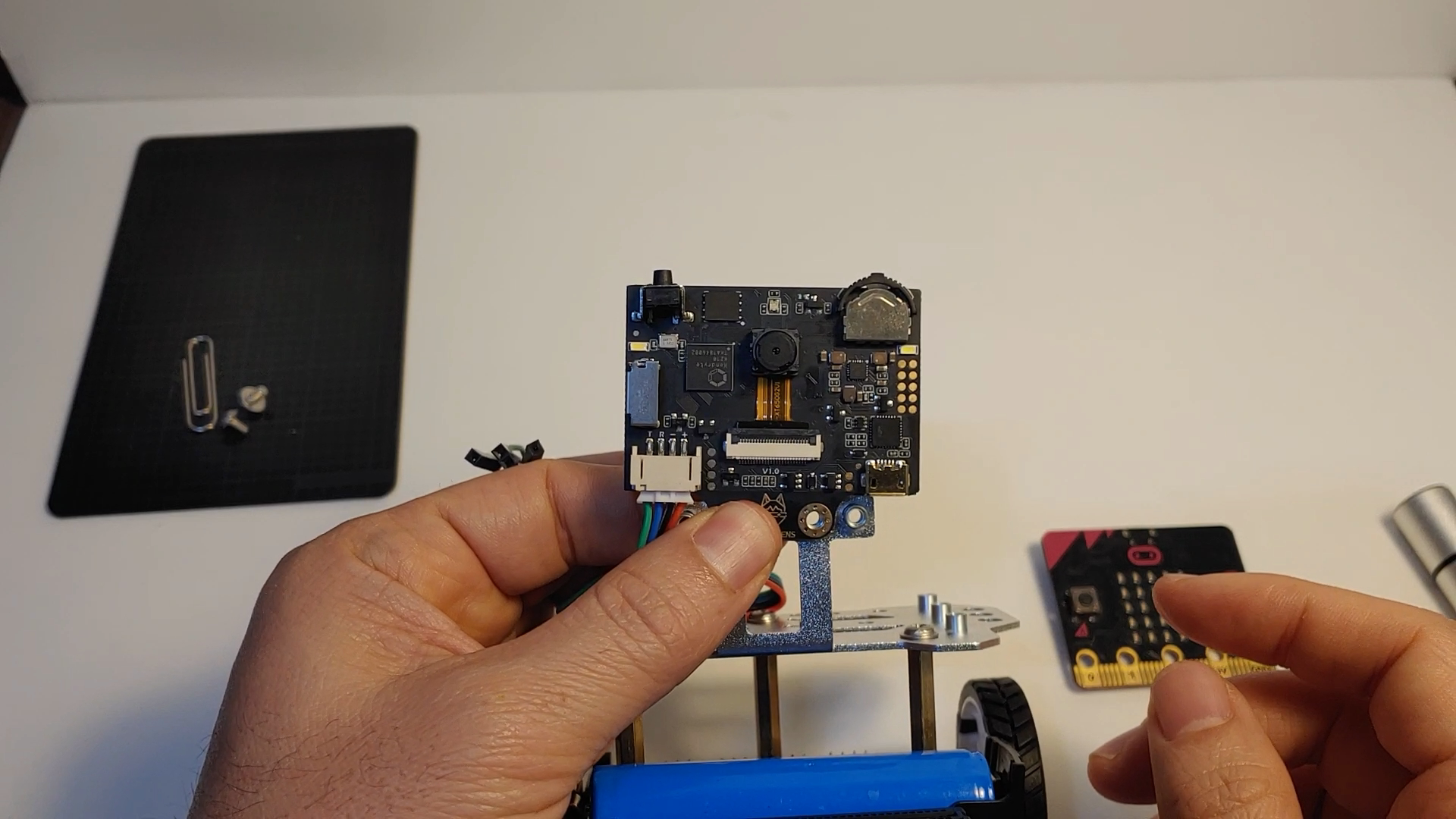
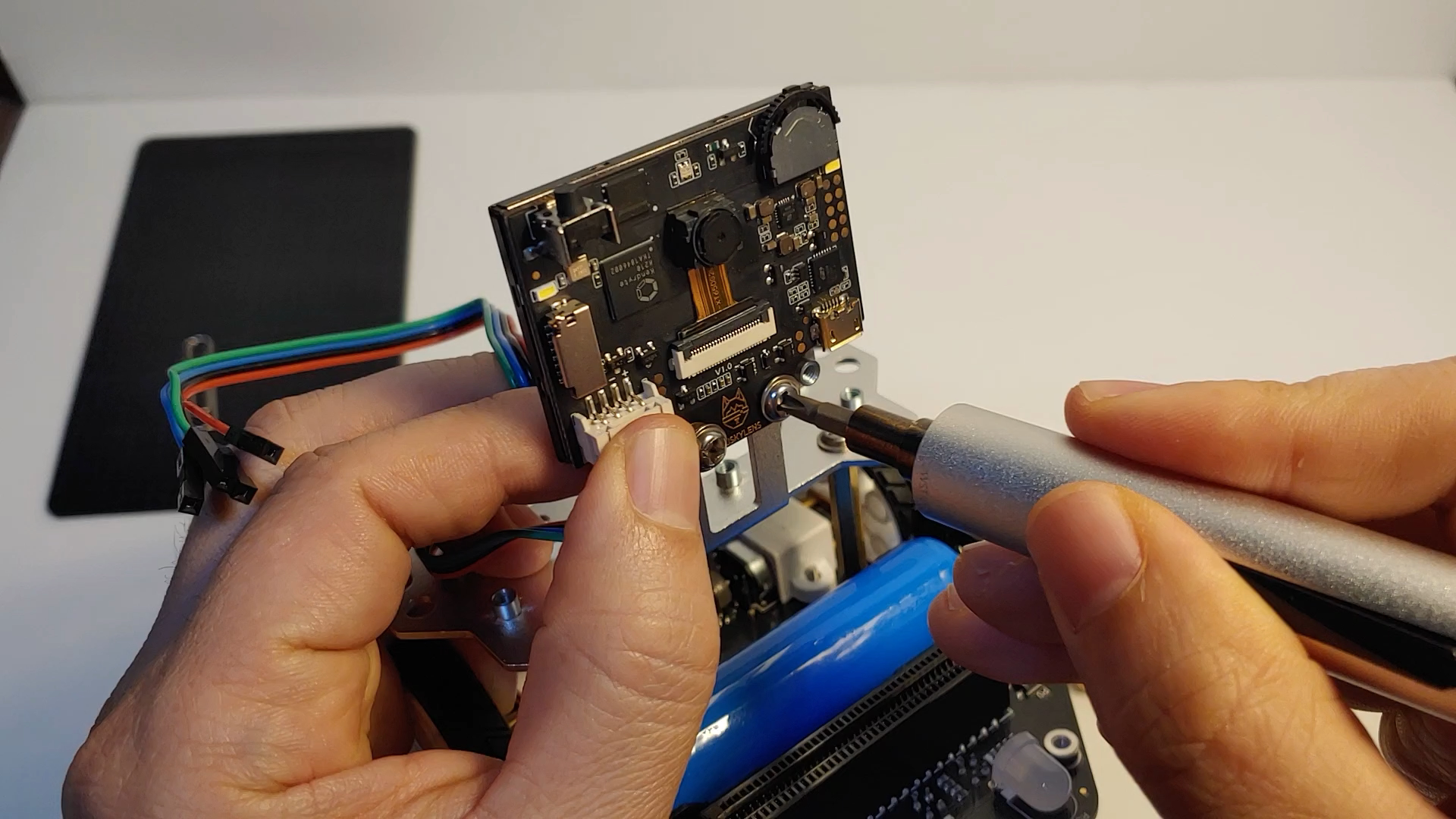
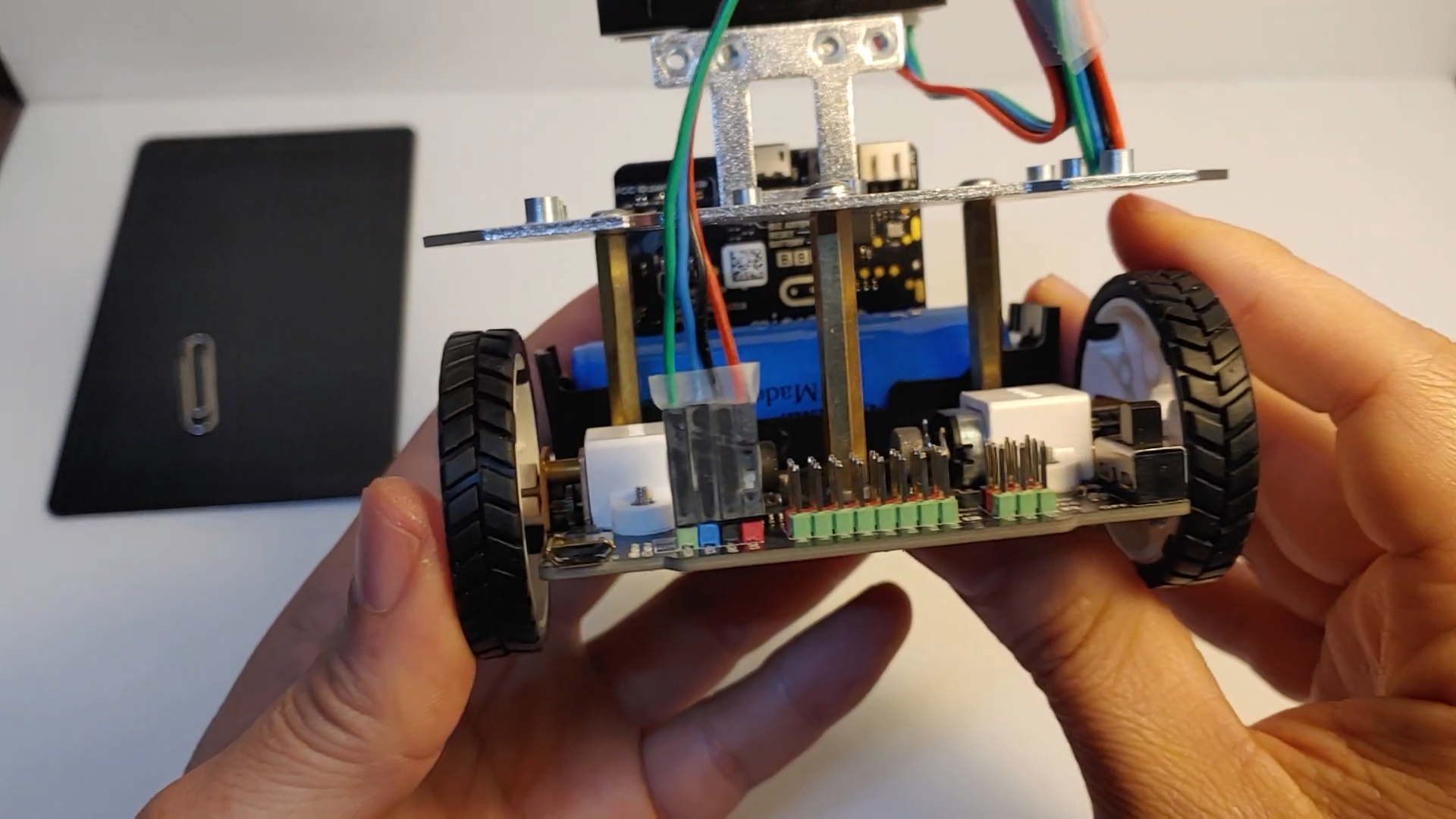
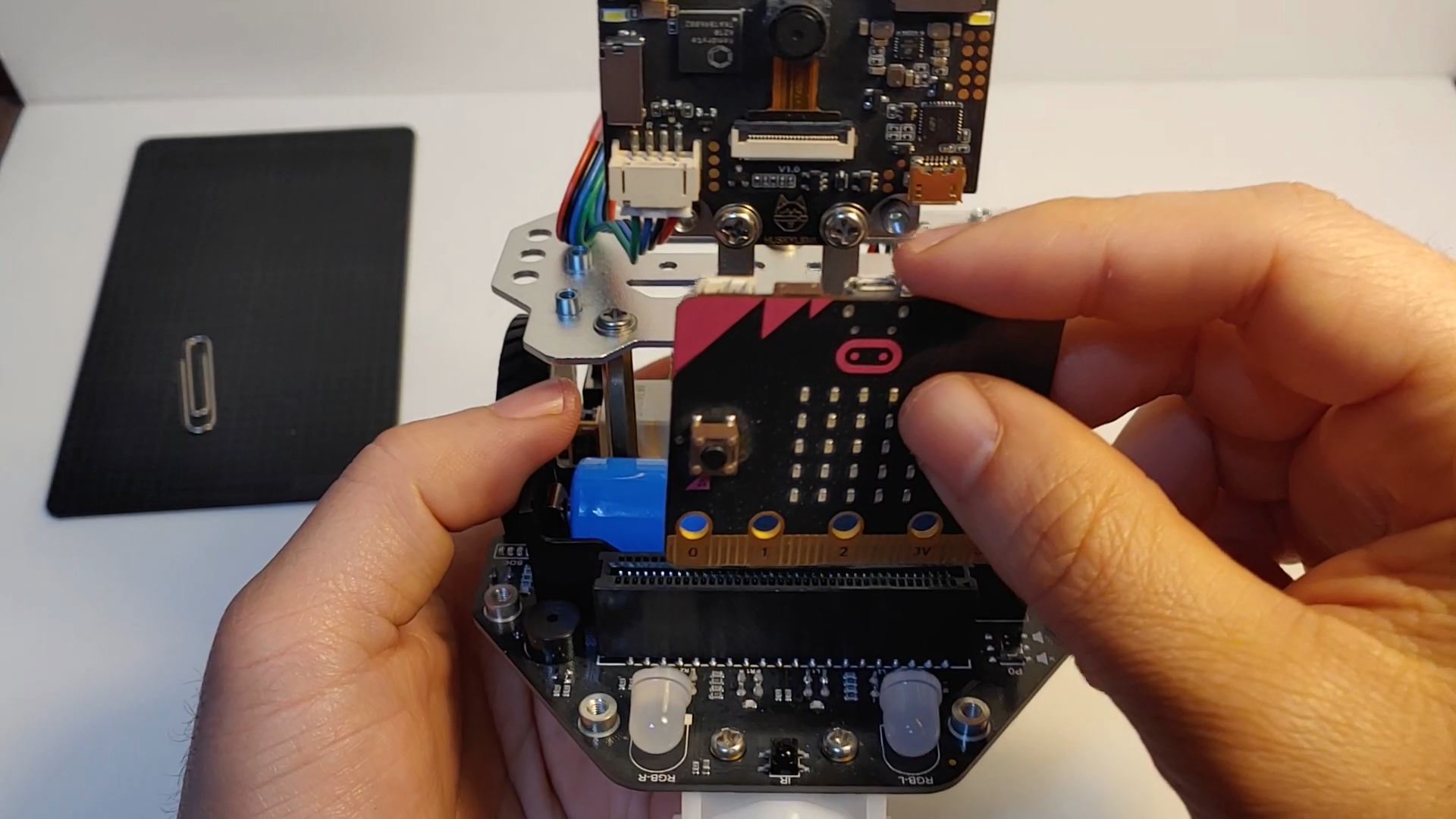
|| 마퀸 플러스 & 허스키렌즈 & 마이크로비트 조립하기
초음파 센서 자리에 허스키렌즈를 조립한다. 그리고 I2C포트에 색을 맞춰서 꽂는다.
|| 메이크코드로 블록코딩 하기
순서도에 맞게 하나씩 하나씩 만들어 보자.
| R/C CAR 블록코딩
조종기 블록코딩
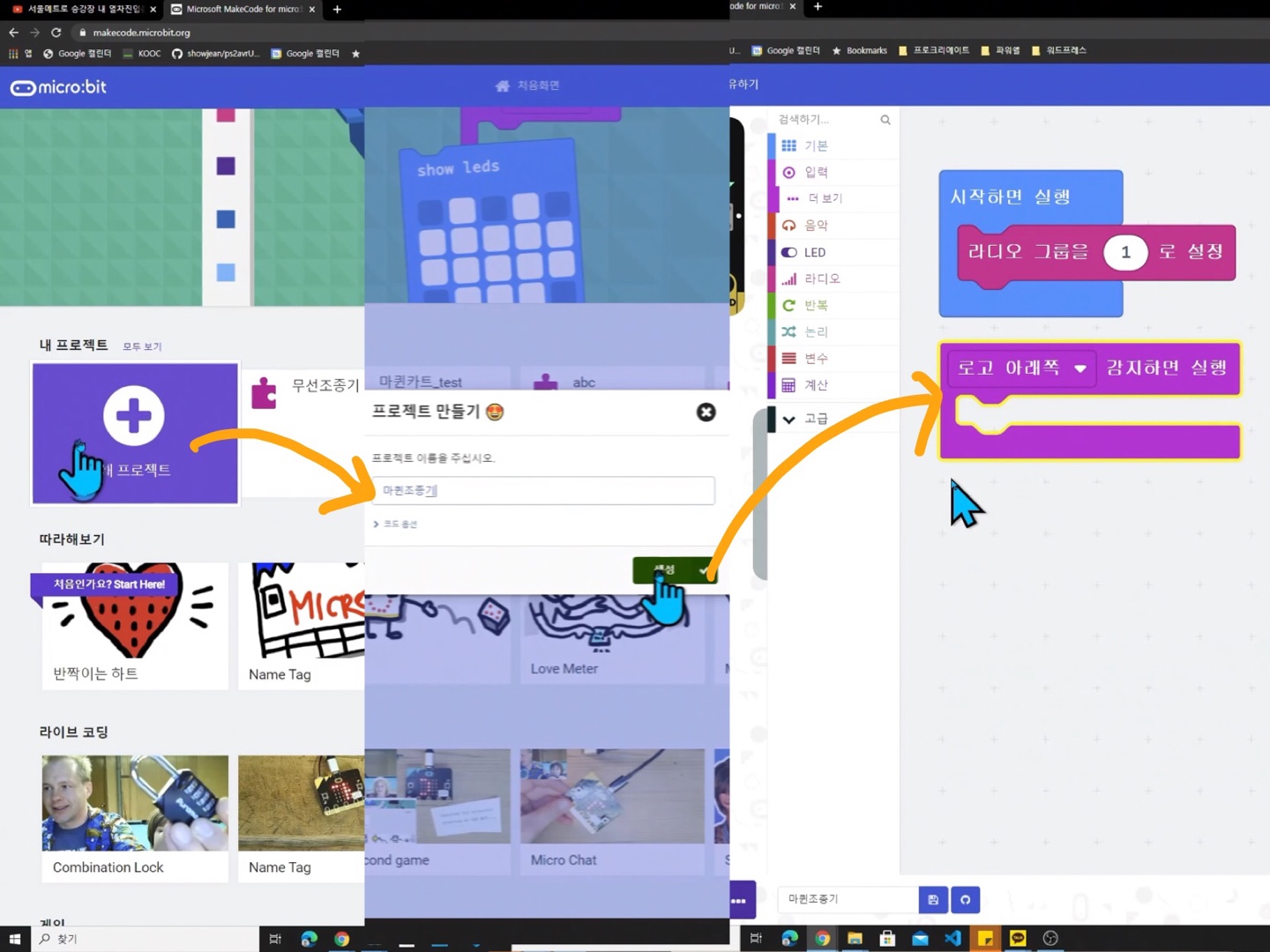
1) 새 프로젝트 만들기
새 프로젝트 만들기
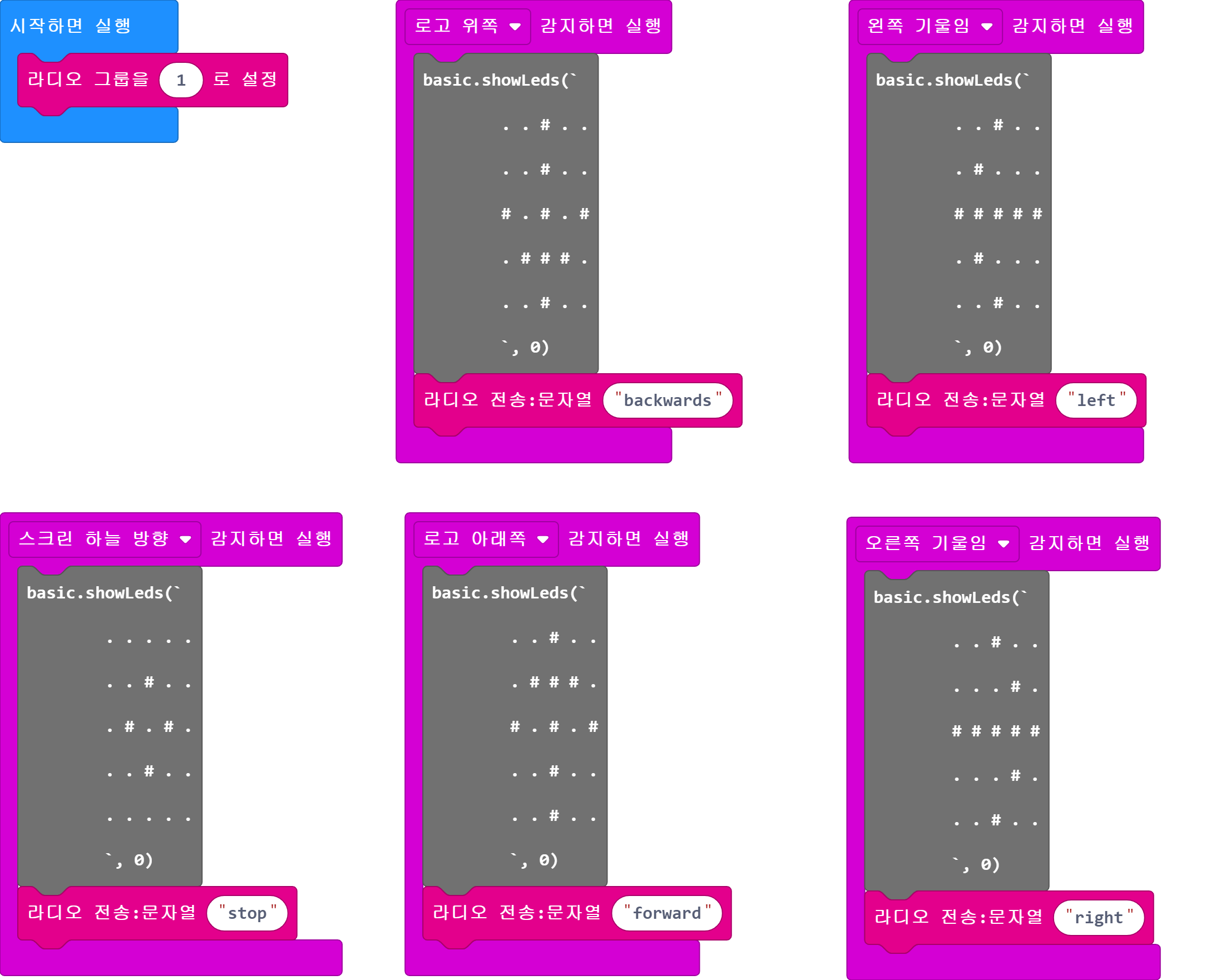
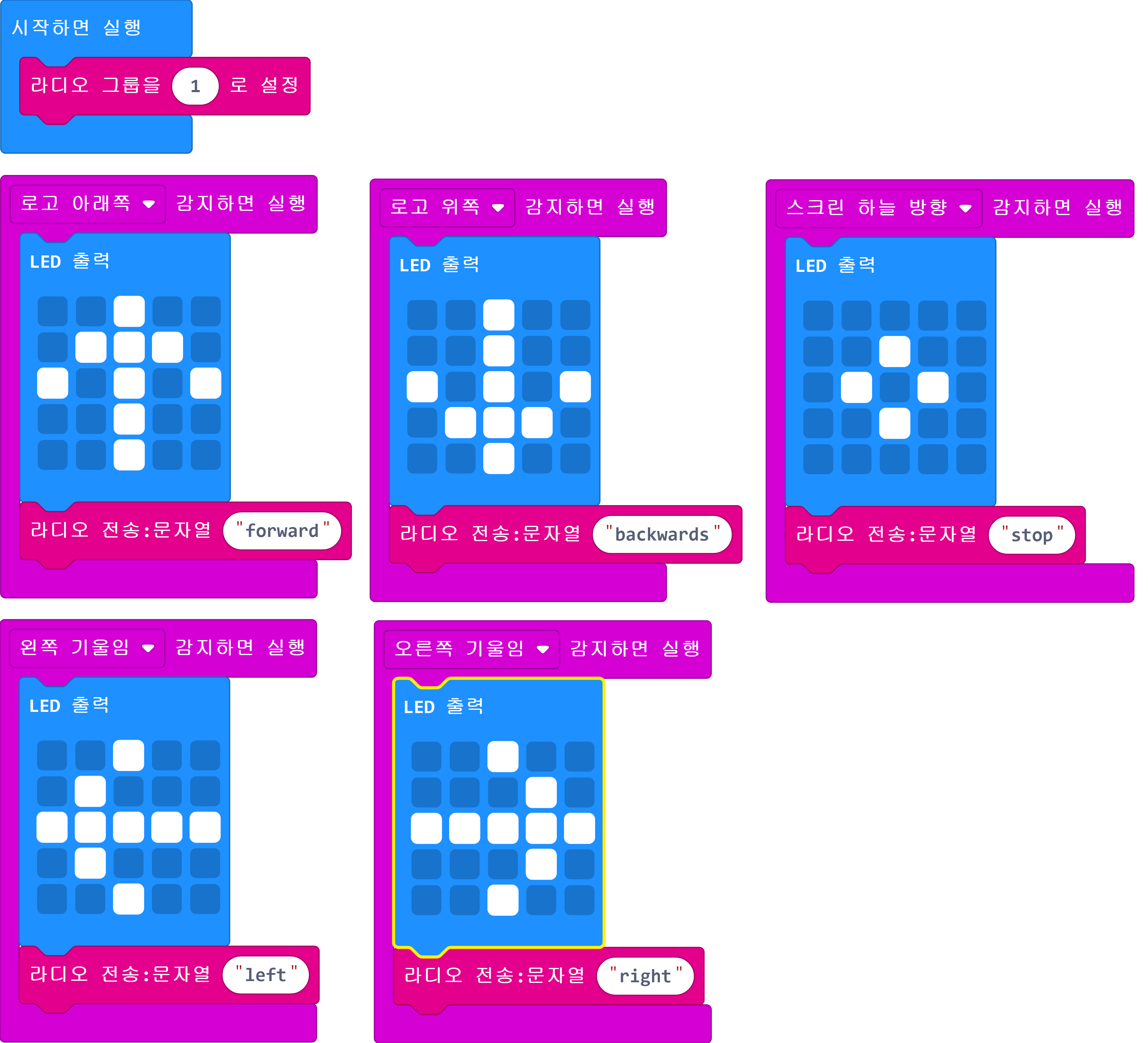
'마퀸조종기' 이름으로 새 프로젝트를 만든다. 조종기는 '라디오 그룹을 '1'로 설정하고, '가속도 센서 감지하면 실행' 블록만 사용한다. '무한반복 실행' 블록은 필요 없으니 삭제 한다.
2) 앞으로, 뒤로, 왼쪽으로, 오른쪽으로, 정지 이벤트에 대한 블록코딩 하기
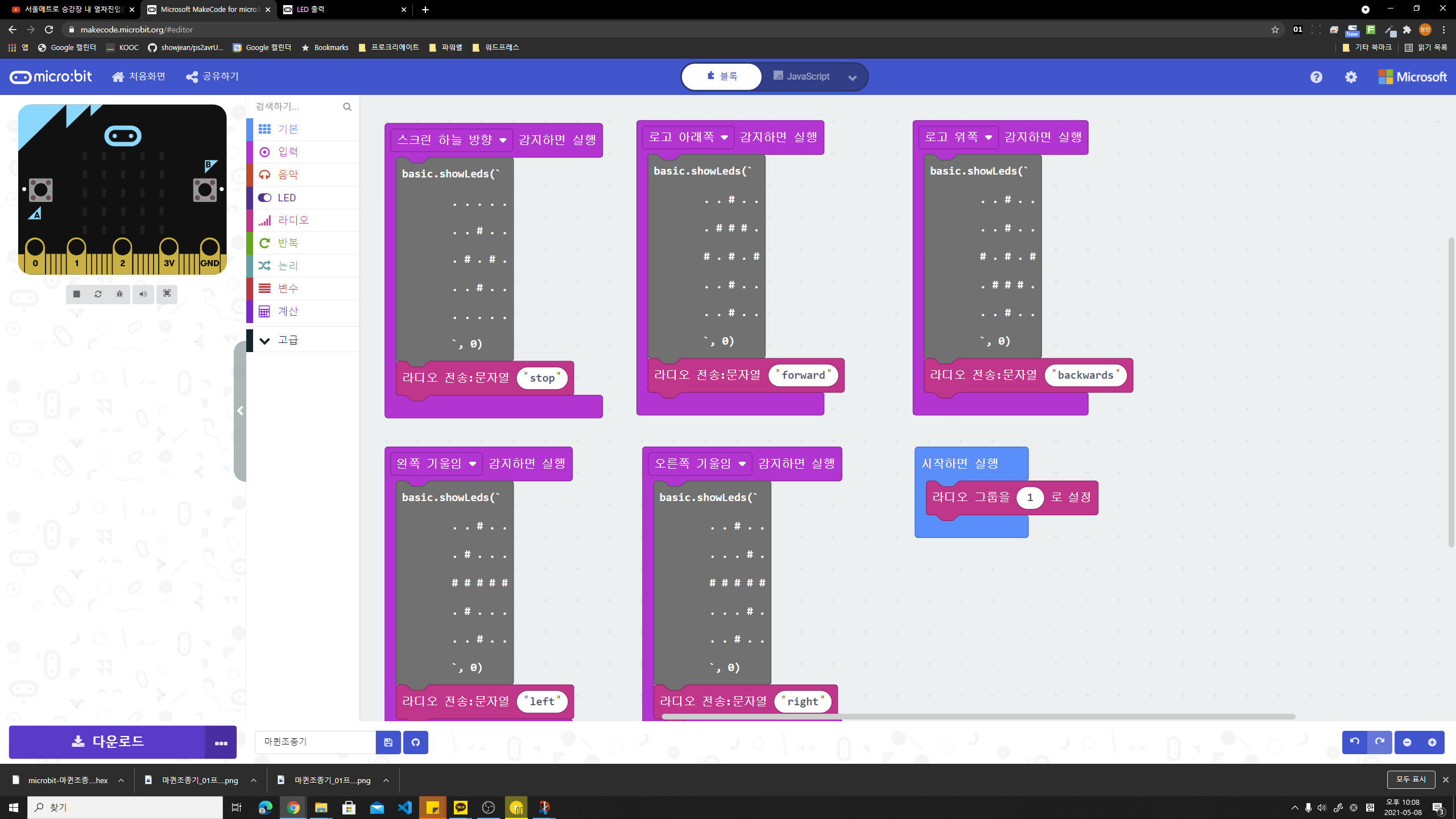
마퀸조종기 전체 블록코드
각각의 이벤트에 맞게 '가속도 센서 감지하면 실행', 'LED 출력' , '라디오 전송 문자열' 블록을 이용하여 블록코딩을 한다. 실제 동작을 해보면 반응이 느리다. LED 출력 블록의 갱신 주기(400ms)가 있어서다. 반을을 빠르게 하려면 갱신 주기를 0 또는 LED 출력을 사용하지 말이야 한다. 블록 편집기에서는 할 수 없기 때문에, 그 부분은 자바스크립트 편집기에서 추가하여 갱신 주기를 0으로 만든다.
LED 출력 갱신 주기 설명
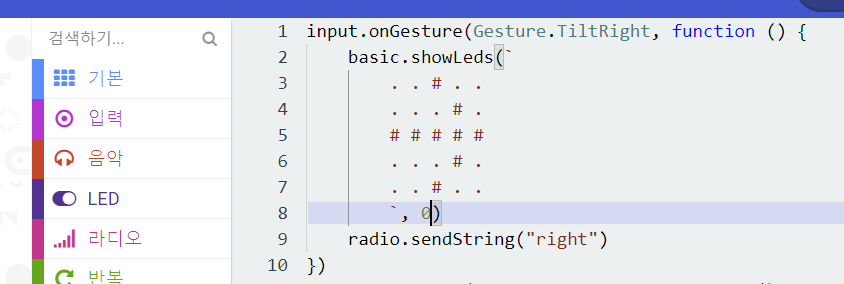
블록 편집기에서 자바스크립트 편집기로 변경하고 ', 0'을 basic.showLeds 함수에 추가한다.
갱신 주기 0으로 만들기마퀸조종기 최종 블록코드
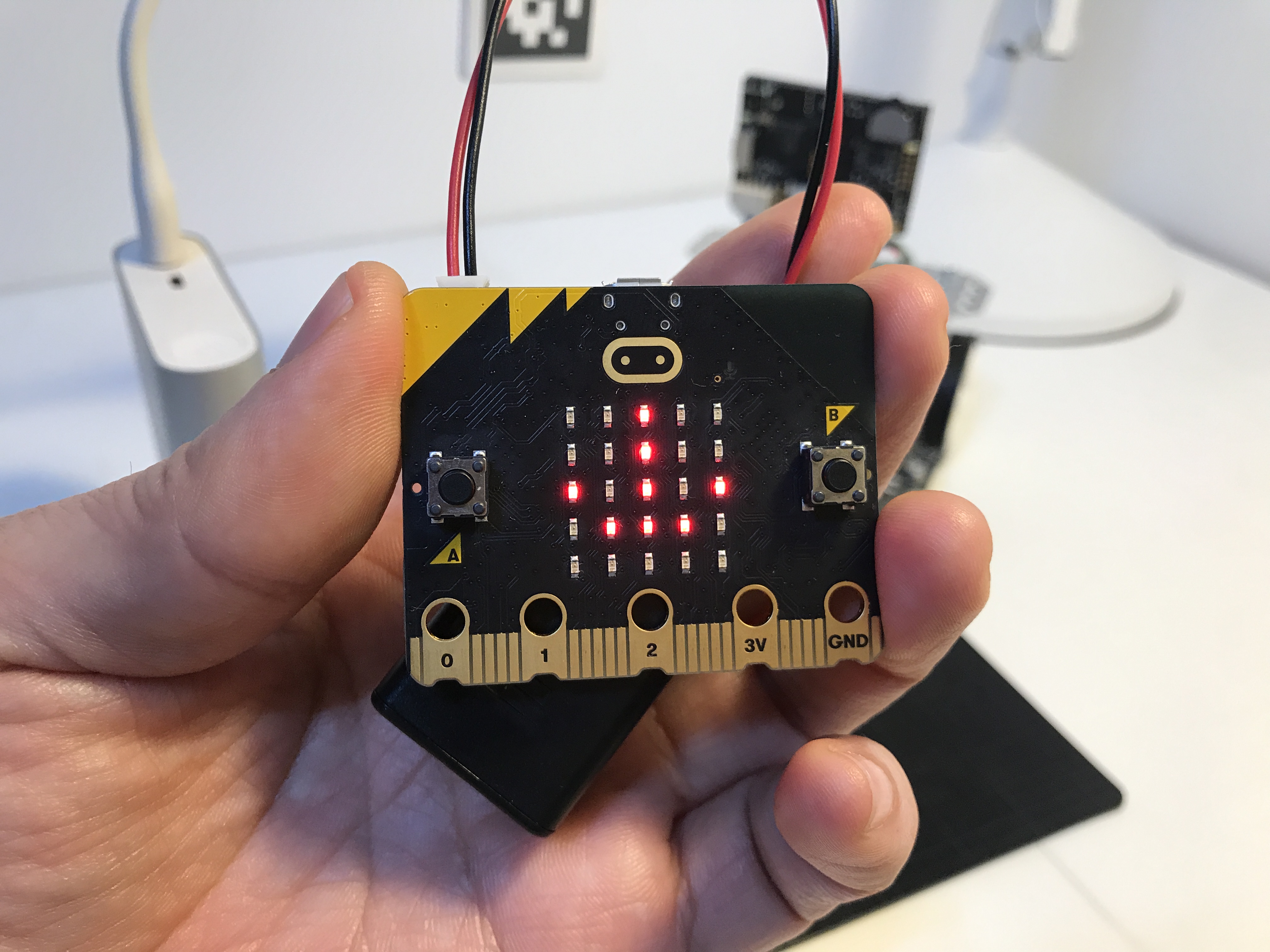
마이크로비트 시뮬레이터로 테스트를 한다. 이상 없이 화살표가 표시 되면 마이크로비트에 다운로드를 한다.
마이크로비트에 마퀸조종기 다운로드
마퀸 플러스 블록코딩
1) 새 프로젝트를 만들기
'마퀸카트' 이름으로 새 프로젝트를 만든다.
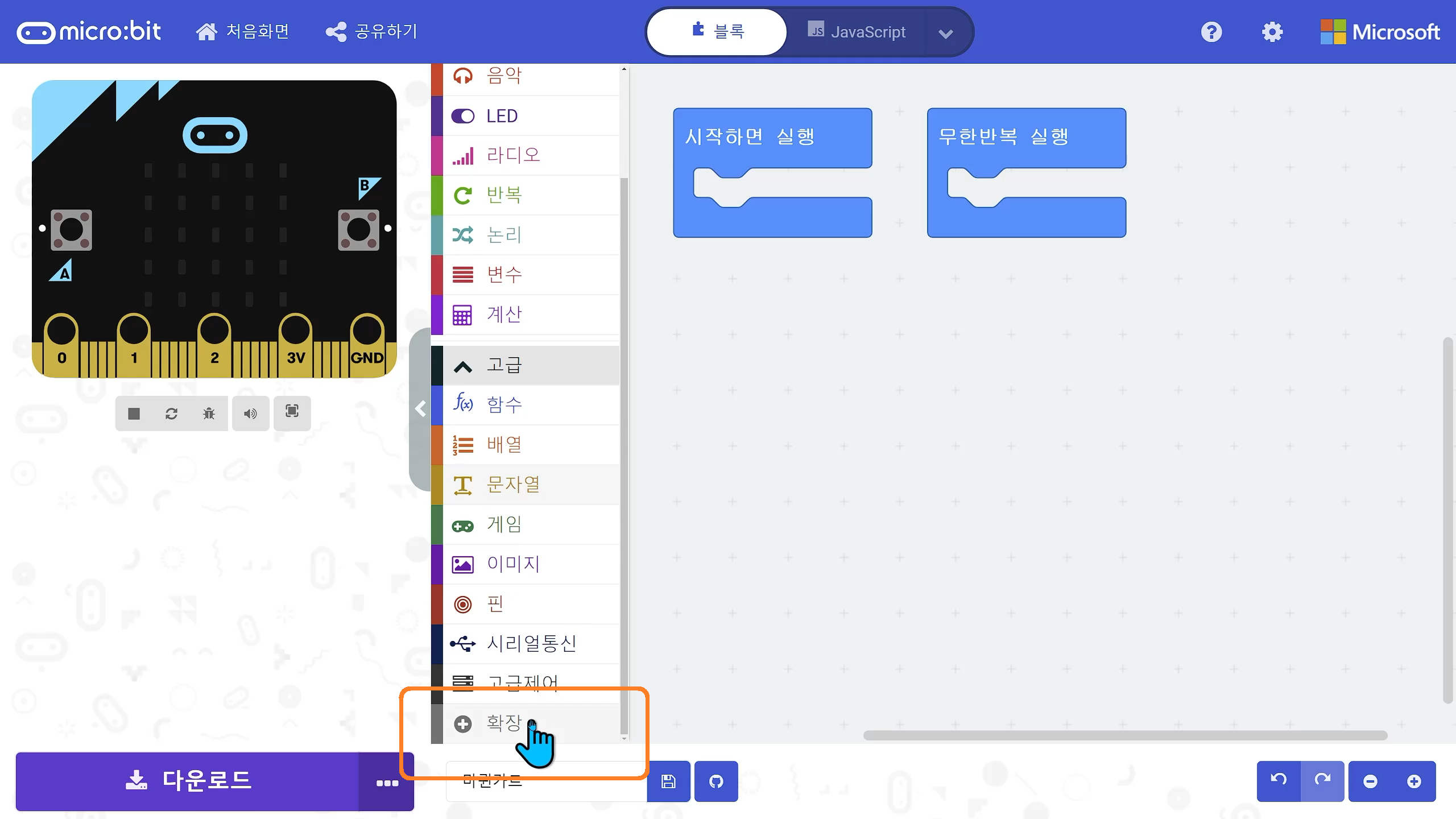
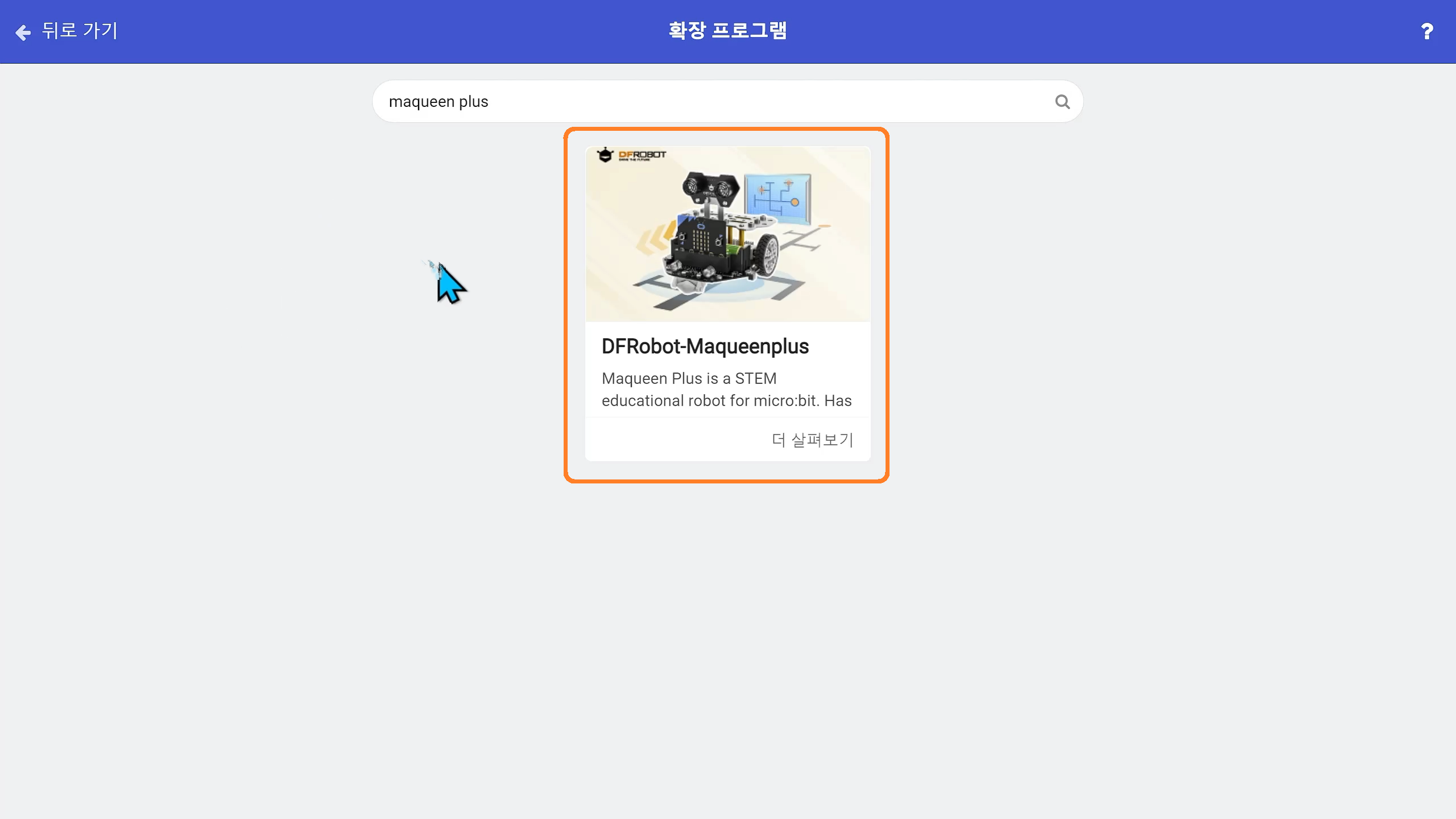
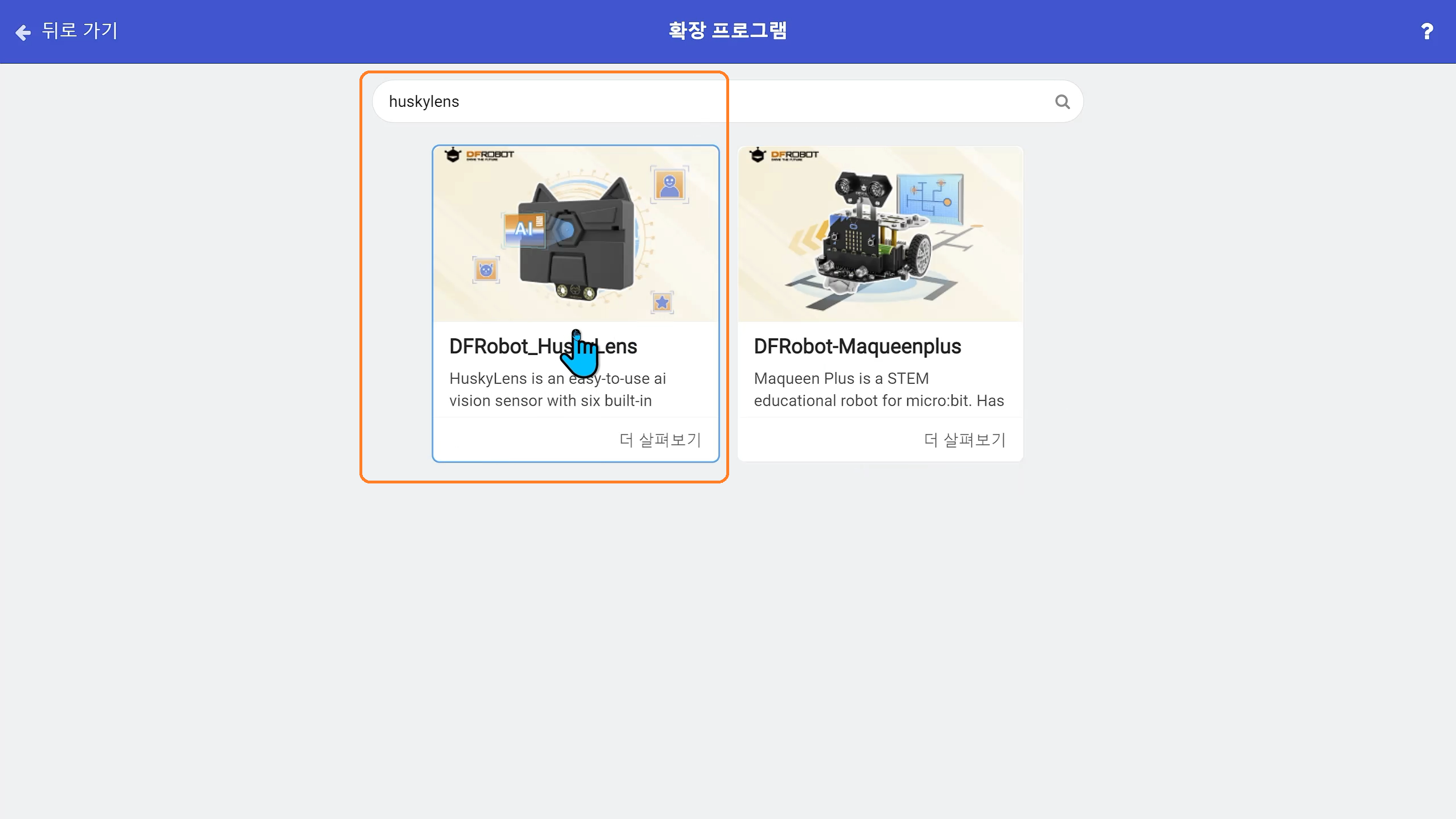
2) 마퀸 플러스 & 허스키렌즈 확장 프로그램 추가하기
고급 > 확장 메뉴를 이용하여 마퀸 플러스와 허스키렌즈 확장 프로그램을 추가한다.
3) I2C 및 라디오 기능 초기화
I2C 및 라디오 기능 초기화
마퀸 플러스 & 허스키렌즈를 사용하기 위해 I2C 초기화를 하고, 허스키렌즈 알고리즘은 Tag Recognition로 설정한다. 마이크로비트 통신을 위한 라디오그룹을 1로 설정한다.
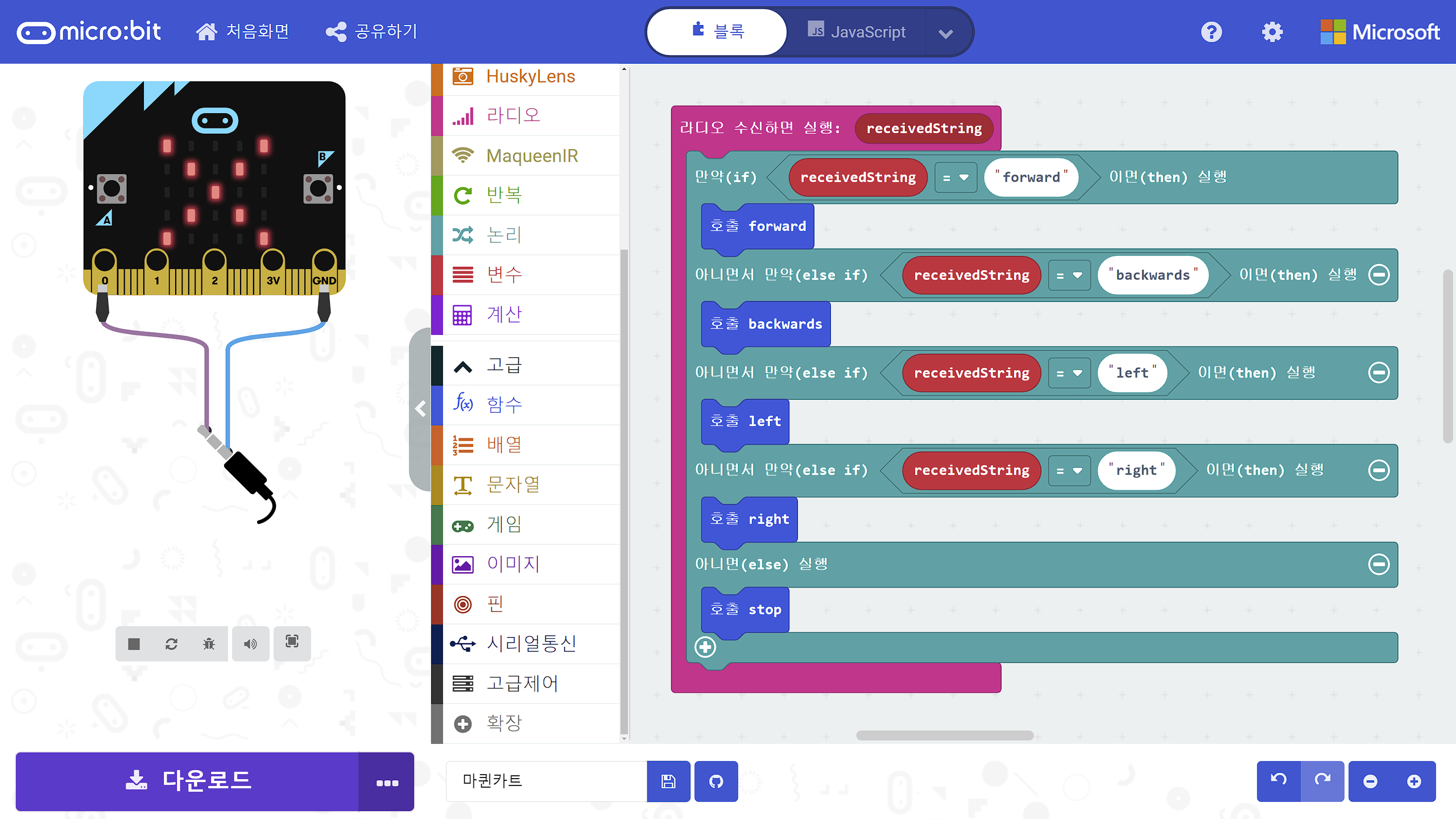
4) 주행을 위한 마퀸 플러스 블록코딩하기
주행을 위한 마퀸 플러스 블록코드
'라디오 수신화면 실행' 블록을 이용하여 forward(앞으로), backwards(뒤로), left(왼쪽으로), right(오른쪽으로), stop(정지) 수신문자열에 동작할 수 있게 블록코딩을 한다. 각각의 동작은 빈 함수로 만들어 놓는다.
5) 앞으로, 뒤로, 왼쪽으로, 오른쪽으로, 정지 함수 블록코딩
앞으로, 뒤로, 왼쪽으로, 오른쪽으로, 정지 함수 블록코드
'LED 출력' 블록을 추가하여 화살표를 그린 후 자바스크립트 편집창에서 ', 0'을 추가하여 LED 표시 갱신 주기를 0으로 만든다.
6) 정지선 인식 블록코딩
정지선인식 블록코드
* 라인트레킹 센서 L2, R2를 이용하여 검은색이 인식되면(정지선)
* 마퀸 플러스 모터의 동작을 멈춘다.
* 허스키렌즈를 이용하여 정해진 Tag를 인식하면 경적을 울리고 앞으로 전진한다.
이것을 findStopLine 함수로 만들어 '무한반복 실행' 블록에 추가한다.
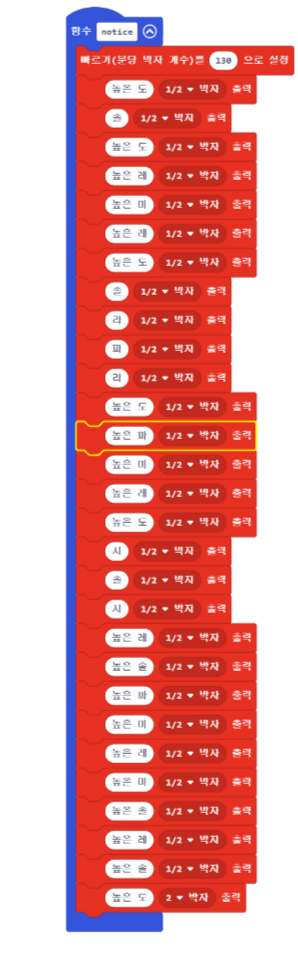
7) 경적 울리기 블록코딩
경적 울리기 블록코드
'도솔도레미레도솔 라파라도파미레도 시솔시레솔파미레 미솔레솔도' 음계만으로 이 노래가 무엇있지 않다면 대단! 들으면 누구나 알 수 있는 노래다. 처음에 음악 블록에 있는 '다다둠'을 사용했다. 그러나 'program too big by' 오류가 났다. 마퀸 플러스 & 허스키렌즈의 차지하는 용량이 꽤 되는거 같다.
8) 완성
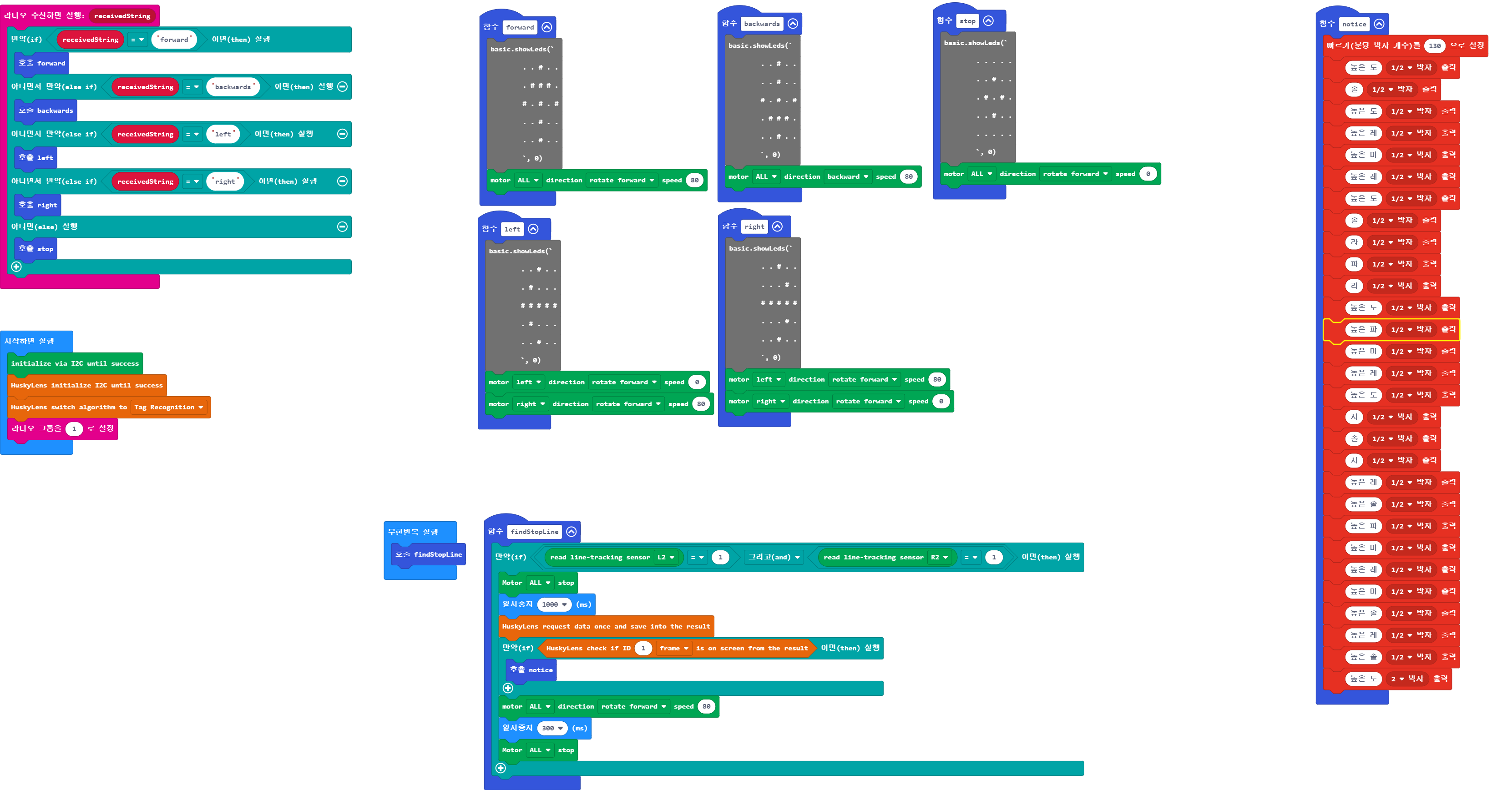
마퀸카트 전체 블록코드
|| 완성된 블록코드
드디어 완성했다. 부족한 부분이 있어 채우면 좋지만, 어렵게 하는 것 보다 단순한 편이 더 좋은 것 같다.