


기존 R/C CAR 구현의 문제점
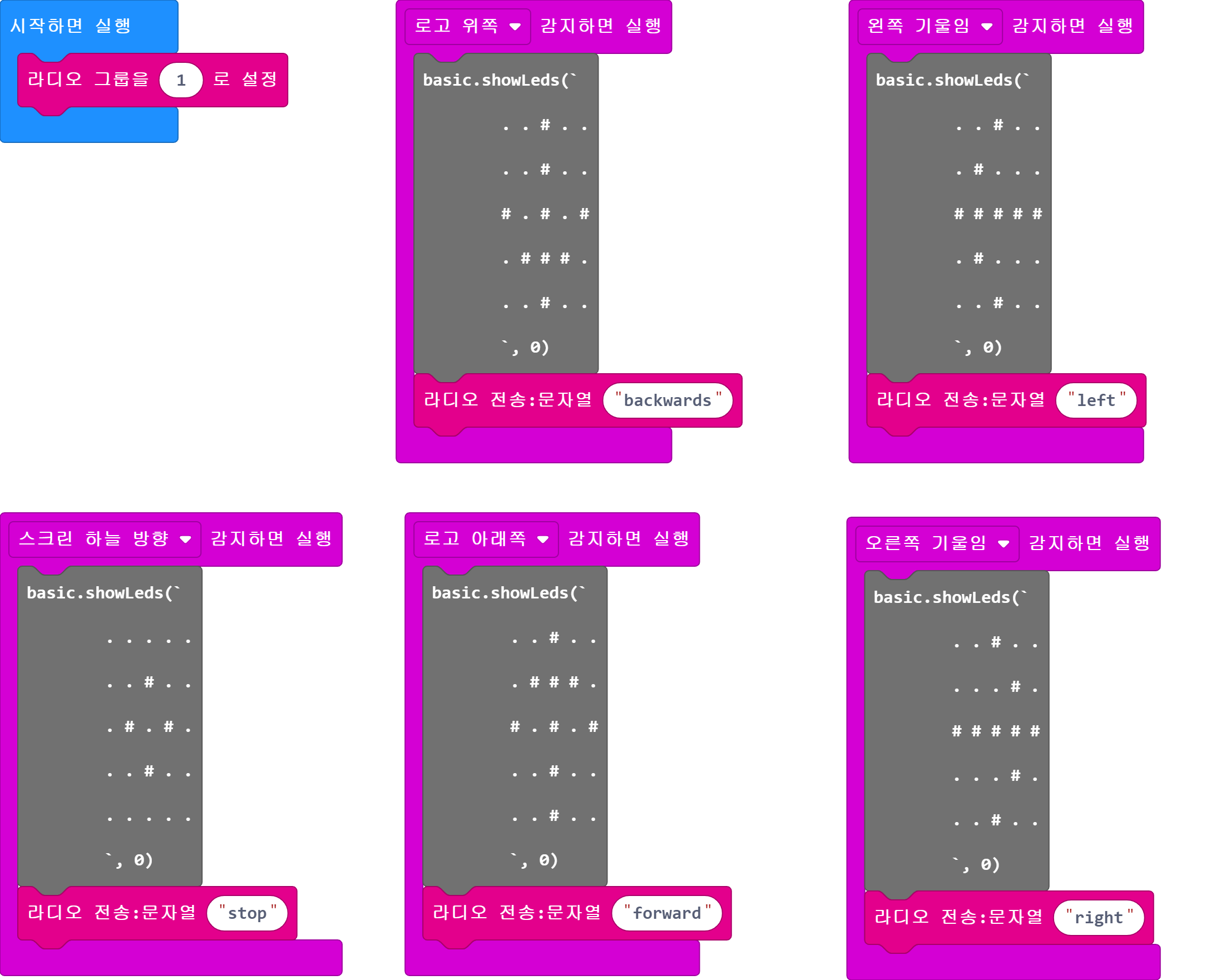
가속도 센서를 감지하면 실행 블록 사용하여 간단하게 구현을 할 수 있다는 장점은 있다. 대신 빠르게 동작(제스처)을 하다 보면 조종기와 R/C CAR가 다를게 동작한다. 예를 들자면 조정기는 왼쪽 기울기 동작을 하고 있는데 R/C CAR는 오른쪽을 동작을 한다. 이유는 이벤트 감지 시 딱 한번 이벤트를 실행하기 때문이다. 또한 한 동작 구현이 5가지로 제한되어있다.
업그레이드된 R/C CAR 구현하기
기존 5가지의 동작에서 대각선 방향이 추가된 9가지 동작을 구현했다. 한번 더 업그레이드 한다면 방향의 크기를 구현할 생각이다. 여기까지 하면 해야 할 것들이 많아져서 자유 미션은 9가지 동작으로 할 것이다.
코드 비교

FC(앞으로) , FL(왼쪽 앞으로), FR(오른쪽 앞으로), CL(외쪽), BL(왼쪽 뒤로), BC(뒤로), BR(오른쪽 뒤로), CR(오른쪽), CC(정지) 9가지 동작(제스처)에 맞게 R/C CAR에서 구현해 주면 된다. 특이한건 boundray 변수를 이용하여 가속도센서가 반응하는 크기를 조절한다. 보통 boundary과 -boundary을 코드로 표현할 때는 그대로 사용하면 되는데, 블록은 [0 빼기(-) boundary] 로 해야 한다.
반응형
'EDU > 마퀸 플러스 & 메카닉 파츠' 카테고리의 다른 글
| 마퀸 & 마퀸 플러스 그리고 마이크로비트 마퀸으로 배우는 AI 세상 (0) | 2021.05.12 |
|---|---|
| [마퀸 플러스 & 메카닉 파츠 무상체험단] A, B 버튼 이벤트 전달하기 (0) | 2021.05.11 |
| [마퀸 플러스 & 메카닉 파츠 무상체험단] 배열에 함수 넣기! (0) | 2021.05.11 |
| [마퀸 플러스 & 메카닉 파츠 무상체험단] 무상체험단 활동 하면서 해야 할 숙제 중 하나인 문서작업 (0) | 2021.05.10 |
| [마퀸 플러스 & 메카닉 파츠 무상체험단] 필수 미션 : 마퀸 플러스가 정지선 앞에 정지하여 정해진 TAG가 인식되면, 경적을 울리고 전진하기 (0) | 2021.05.08 |

두리뭉실:해피파인더그룹
컴퓨터 코치 두리뭉실